Descripción
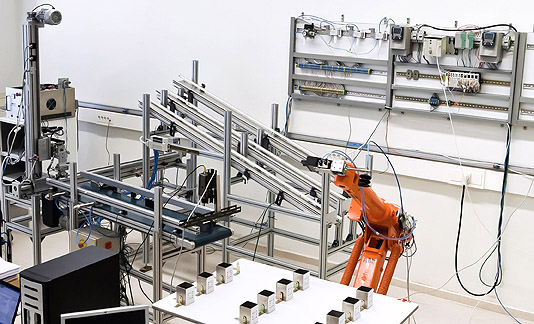
La célula electroneumática del LRA-ULE simula una cadena de montaje con elementos electroneumáticos a través de la cual circulan piezas que se ven sometidas a distintos procesos de fabricación (simulación de taladrado, eliminación de componentes defectuosos…).
 Un usuario registrado puede interactuar con los actuadores presentes en la maqueta, conocer el estado actual de la célula con una webcam o visualizando históricos, cargar estrategias predefinidas, etc. Todo ello de forma remota a través de internet.
La planta dispone de una serie de componentes neumáticos con sensores magnéticos y electroválvulas, así como de una cinta transportadora controlada por un variador.
El sistema incluye los siguientes componentes:
Un usuario registrado puede interactuar con los actuadores presentes en la maqueta, conocer el estado actual de la célula con una webcam o visualizando históricos, cargar estrategias predefinidas, etc. Todo ello de forma remota a través de internet.
La planta dispone de una serie de componentes neumáticos con sensores magnéticos y electroválvulas, así como de una cinta transportadora controlada por un variador.
El sistema incluye los siguientes componentes:
Un usuario registrado puede interactuar con los actuadores presentes en la maqueta, conocer el estado actual de la célula con una webcam o visualizando históricos, cargar estrategias predefinidas, etc. Todo ello de forma remota a través de internet.
La planta dispone de una serie de componentes neumáticos con sensores magnéticos y electroválvulas, así como de una cinta transportadora controlada por un variador.
El sistema incluye los siguientes componentes:
- Robot ABB con su correspondiente controlador. Consta de 2 partes bien definidas: el brazo robot y el armario de control.
- Cinta transportadora en la que se encuentran instalada:
- Cilindros de doble efecto
- Sensores fotoeléctricos
- Camara web para vision computacional
- Manipulador neumático
- Rampa de clasificación con 3 carriles para 3 tipos de piezas. Se ha diseñado con vistas a implementar un sistema de control de colas.
Ficha Técnica
- COMPONENTES ABB.
- Robot IRB 1400.
- COMPONENTES SCHNEIDER ELECTRIC.
- Variador de Velocidad Telemecanique Altivar 71.
- PLC Telemecanique Modicon M340 para Utilities.
- PLC TSX57 premium para Control.
- Periferia descentralizada Advantys STB.
- Modulos E/S periferia descentralizada.
- ACTUADORES.
- Actuador rotativo y lineal combinado: MRQBS32-10CB.
- Actuador rotativo doble cremallera-piñón: MSQB10A.
- Pinzas de apertura paralela: MHL2-100.
- Cilindro de doble efecto: CD85N25-100C-B.
- COMPONENTES SMC.
- Cilindros neumáticos de doble efecto CD85N25-100C-B.
- Bloque 10 electroválvulas (con válvulas SY5220-5LOU, SY5120-5LOU, SY3160-5LOU, SY3260-5LOU)
- Generador de Vacio.
- Sensores magnéticos para cilindros D-H7A2, D-F79, D-A93.
- Válvula General de apertura progresiva.
- Válvula General de circuito.
- Sensores de presión.
- COMPONENTES OMRON.
- Sensores Inductivos E2A.
- Sensores fotoeléctricos E3F2.
Galería de Imágenes
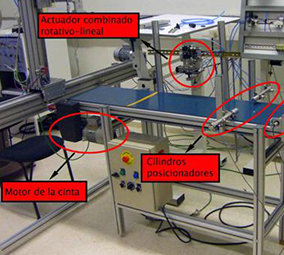
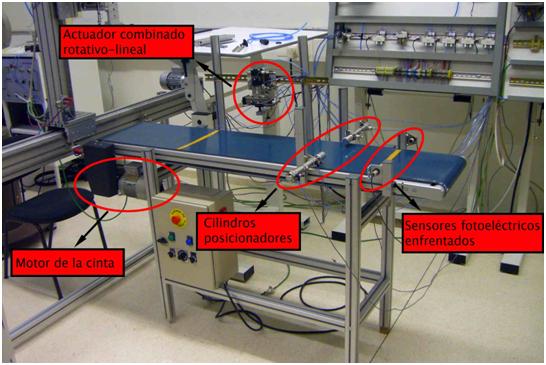
CINTA TRANSPORTADORA
La cinta transportadora es un sistema que nos permite desplazar las cajas desde el punto donde el robot las deposita hasta que el manipulados se haga cargo de ellas. Está construida con perfiles de aluminio como los empleados en el manipulador. En la imagen se pueden apreciar todos los subsistemas montados sobre la cinta.
 ©2022 Laboratorio Remoto de Automática
©2022 Laboratorio Remoto de Automática